4) O MATLAB® é software de computação numérica que possibilita realizar cálculos matemáticos, modelamento de sistemas dinâmicos, simulações, gráfic...
4)
O MATLAB® é software de computação numérica que possibilita realizar cálculos matemáticos, modelamento de sistemas dinâmicos, simulações, gráficos científicos e desenvolvimento de algoritmos, incluindo a interfaces gráficas com o usuário nas mais diversas áreas cientificas. Além disso, este software se caracteriza por apresentar uma grande biblioteca de funções e comandos já prontos que otimiza o tempo gasto nas tarefas.
Dado o diagrama de blocos de um sistema de controle:
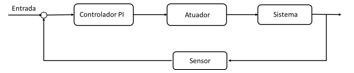
Analisando o diagrama de blocos de um sistema de controle, tem-se que uma possível programação para teste do controlador PI é dada pelas seguintes linhas de código:
Selecione uma alternativa:
a)
R1 = 1; R2 = 1; R3 = 1; R4 = 1; C2 = 1;
K_p = (R4*R2)/(R3*R1);
num_T_i = [R2*C2 1];
den_T_i = [R2*C2 0];
sys_T_i = tf(num_T_i,den_T_i)
f_t_Amp_op = K_p*sys_T_i
b)
R1 = 1; R2 = 1; R3 = 1; C2 = 1;
K_p = (R2)/(R3*R1);
num_T_i = [R2*C2 1];
den_T_i = [R2*C2 0];
sys_T_i = tf(num_T_i,den_T_i)
f_t_Amp_op = K_p*sys_T_i
c)
R1 = 1; R2 = 1; R3 = 1; R4 = 1; C2 = 1;
K_p = (R4*R2)/(R3*R1);
num_T_i = [R2*C2 1];
den_T_i = [R2*C2 1 0];
sys_T_i = tf(num_T_i,den_T_i)
f_t_Amp_op = K_p*sys_T_i
d)
R1 = 1; R2 = 1; R3 = 1; R4 = 1; C2 = 1;
K_p = (R4*R2)/(R3*R1);
num_T_i = [R2*C2 1 1];
den_T_i = [R2*C2 0 1];
sys_T_i = tf(num_T_i,den_T_i)
f_t_Amp_op = K_p*sys_T_i
e)
R1 = 1; R2 = 1; R3 = 1; R4 = 1; C2 = 1;
K_p = (R4*R2)/(R3*R1);
num_T_i = [R2*C2 1];
den_T_i = [R2*C2];
sys_T_i = tf(num_T_i,den_T_i)
f_t_Amp_op = K_p*sys_T_i
💡 1 Resposta
Danielle Guimarães
PRECISO DE UMA RESPOSTA

Faça como milhares de estudantes: teste grátis o Passei Direto

Esse e outros conteúdos desbloqueados

16 milhões de materiais de várias disciplinas

Impressão de materiais
Agora você pode testar o
Passei Direto grátis
✏️ Responder
Para escrever sua resposta aqui, entre ou crie uma conta
Perguntas relacionadas
Materiais relacionados
 14 pág.
14 pág.
Compartilhar